Indice dei contenuti
Valutare le metriche di progettazione
1. Parametri di ingresso: dimensione della tensione di ingresso, CA o CC, numero di fasi, frequenza, ecc.
I livelli di tensione internazionali comprendono 120Vac monofase, 220Vac, 230Vac, ecc. L'intervallo di tensione CA accettato a livello internazionale è 85~265V. Generalmente include la tensione nominale di ingresso e il suo intervallo di variazione;
L'ingresso monofase è spesso utilizzato per potenze inferiori a 3kW, mentre l'ingresso trifase è utilizzato per potenze superiori a 5kW;
La frequenza di alimentazione industriale è generalmente di 50 o 60 Hz, quella aerospaziale e quella navale di 400 Hz.
Se sono presenti indicatori di fattore di potenza (Power Factor) e di armoniche (Distorsione Armonica Totale)
Parametri di uscita: potenza di uscita, tensione di uscita, corrente di uscita, ondulazione, precisione di stabilizzazione della tensione (corrente costante), velocità di regolazione, caratteristiche dinamiche (tempo di assestamento), tempo di avvio dell'alimentazione e tempo di mantenimento.
Tensione di uscita: valore nominale + intervallo di regolazione. Il limite superiore della tensione di uscita deve essere il più vicino possibile al valore nominale per evitare un margine di progettazione eccessivo e non necessario.
Corrente di uscita: valore nominale + multiplo di sovraccarico. Se è richiesto un flusso costante, sarà specificato anche l'intervallo di regolazione. Alcuni alimentatori non consentono l'assenza di carico, pertanto è necessario specificare anche un limite di corrente inferiore.
Accuratezza della stabilizzazione della tensione e della corrente: i fattori che influiscono sono il tasso di regolazione della tensione di ingresso, il tasso di regolazione del carico e la deviazione di invecchiamento. L'accuratezza della sorgente di riferimento, l'accuratezza dei componenti di rilevamento e l'accuratezza dell'amplificatore operazionale nel circuito di controllo hanno una grande influenza sull'accuratezza della stabilizzazione della tensione e della corrente.
3. Efficienza: il rapporto tra la potenza di uscita e la potenza attiva di ingresso alla tensione di ingresso nominale, alla tensione di uscita nominale e alla corrente di uscita nominale.
Perdite: Perdite strettamente correlate alla frequenza di commutazione: perdite di commutazione dei dispositivi di commutazione, perdite di ferro dei componenti magnetici, perdite dei circuiti di assorbimento.
Perdita di stato nel circuito: perdita di stato dei dispositivi di commutazione, perdita di rame dei componenti magnetici, perdita di linea. Questa perdita dipende dalla corrente.
Altre perdite: perdite del circuito di controllo, perdite del circuito di pilotaggio, ecc. In genere, l'efficienza di un alimentatore con una tensione di uscita più elevata è superiore a quella di un alimentatore con una tensione di uscita più bassa. L'efficienza degli alimentatori ad alta tensione di uscita può raggiungere un'efficienza compresa tra 90% e 95%. L'efficienza dei circuiti ad alta potenza può essere superiore a quella dei circuiti a bassa potenza.
4. Tasso di regolazione della tensione e tasso di regolazione del carico
Tasso di regolazione della tensione (sorgente): Il tasso di regolazione dell'alimentazione si basa solitamente sul tasso di deviazione della tensione di uscita causato dalle variazioni della tensione di ingresso in condizioni di carico nominale. Come indicato nella seguente formula: Vo(max)-Vo(min) / Vo(normale), ovvero la deviazione della tensione di uscita deve essere compresa entro i limiti superiore e inferiore specificati, ovvero entro il valore assoluto dei limiti superiore e inferiore della tensione di uscita.
Regolazione del carico: La definizione di regolazione del carico è la capacità di un alimentatore a commutazione di fornire una tensione di uscita stabile quando la corrente di carico di uscita cambia. Oppure, quando la corrente di carico in uscita cambia, la deviazione della tensione di uscita non deve superare i valori assoluti superiore e inferiore.
Metodo di prova: Dopo che l'alimentatore in prova ha stabilizzato il motore termico in condizioni di tensione d'ingresso e di carico normali, misurare il valore della tensione d'uscita con carico normale, quindi misurare il valore della tensione d'uscita con carico leggero (Min) e carico pesante (Max) rispettivamente (rispettivamente Vmax e Vmin), il tasso di regolazione del carico è di solito la percentuale del tasso di deviazione della tensione d'uscita causata dalle variazioni della corrente di carico con una tensione d'ingresso fissa normale, come mostrato nella seguente formula: V0(max)-V0(min) / V0(normale)
5. Caratteristiche dinamiche: variazioni della tensione di uscita in caso di variazioni improvvise del carico.
L'alimentatore a commutazione garantisce la stabilità della tensione di uscita attraverso un circuito di controllo di retroazione. In realtà, l'anello di controllo di retroazione ha una certa larghezza di banda, che limita la risposta dell'alimentatore alle variazioni della corrente di carico, che possono rendere l'alimentatore switching instabile, fuori controllo o oscillante. In realtà, la corrente di carico dell'alimentatore cambia dinamicamente quando è in funzione, quindi il test di carico dinamico è estremamente importante per l'alimentatore.
I carichi elettronici programmabili possono essere utilizzati per simulare le peggiori condizioni di carico quando l'alimentatore è effettivamente in funzione, come il rapido aumento e la diminuzione della corrente di carico, la pendenza e il ciclo. Se l'alimentatore è sottoposto a condizioni di carico severe, può comunque mantenere una tensione di uscita stabile. Non causare overshoot o undershoot, altrimenti la tensione di uscita dell'alimentatore supererà la componente di carico (ad esempio, la tensione istantanea di uscita di un circuito TTL dovrebbe essere compresa tra 4,75V e 5,25V, in modo da non causare il malfunzionamento del circuito logico TTL).
6. Tempo di avvio dell'alimentazione (Set-Up Time) e tempo di attesa (Hold-Up Time)
Tempo di avvio: si riferisce al tempo che intercorre tra il momento in cui l'alimentatore viene collegato all'ingresso e l'aumento della tensione di uscita nell'intervallo regolato. Prendendo come esempio un alimentatore con un'uscita di 5 V, il tempo di avvio va dal momento in cui l'alimentatore viene acceso fino a quando la tensione di uscita raggiunge i 4,75 V. fino al momento.
Tempo di mantenimento: Il tempo che intercorre tra l'interruzione dell'alimentazione di ingresso e la caduta della tensione di uscita al di fuori dell'intervallo regolato. Prendendo come esempio un alimentatore con un'uscita di 5 V, il tempo di mantenimento va dal momento in cui viene tolta l'alimentazione fino a quando la tensione di uscita non scende al di sotto di 4,75 V. Il valore generale è di 10-20 ms, per evitare che il funzionamento del carico sia influenzato da un'interruzione di tensione di breve durata (mezzo o un ciclo di tensione di rete) nell'alimentazione dell'azienda elettrica.
7. Velocità di regolazione trasversale dell'alimentazione di uscita multicanale:
Il multi-output deve anche considerare il tasso di aggiustamento incrociato (Cross Regulation).
Qual è il tasso di aggiustamento trasversale?
Quando il carico di un'uscita cambia, l'intervallo di variazione della tensione dell'altra uscita.
Metodi convenzionali per migliorare il tasso di aggiustamento incrociato: aggiustamento post-stage
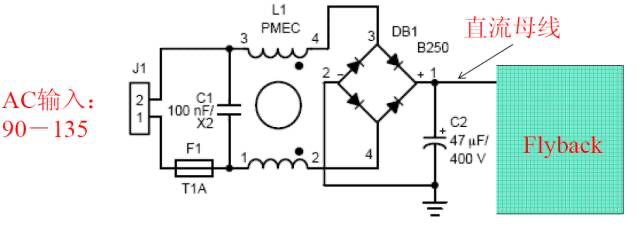
Come ad esempio: uscita multicanale a bassa potenza Flyback
Gamma di tensione di ingresso............90~264VAC, 120-370VDC
Corrente di ingresso......................2.0A/115V 1.1A/230V, frequenza di ingresso: 47~63HZ
Corrente di spunto............. Corrente di avviamento a freddo 20A/115V 40A/230V
Corrente di dispersione................< 2mA/240VAC
Campo di regolazione della tensione di uscita..........CH1: -5~+10%
Tasso di regolazione della tensione............CH1: < 1%, CH2: < 1%
Tasso di regolazione del carico......CH1: < 3%, CH2/3: < 4-8%
Protezione da sovraccarico............105%~150% Tipo di protezione: limite di corrente, recupero automatico
Protezione da sovratensione............115-135%CH1 tensione nominale in uscita
Coefficiente di temperatura............±0,03%℃ (0~50℃)
Tempo di avvio, salita, attesa... 800 ms, 60 ms, 20 ms
Resistenza agli urti............10~500Hz, 2G, tre assi 10min./1 ciclo, 1 ora per asse
Resistenza alla pressione......................Ingresso-uscita: 3KVAC, ingresso-cassa: 1,5KVAC,
Uscita-chiusura: 0,5KVAC 1 minuto
Resistenza di isolamento............Ingresso-uscita, ingresso-terra, uscita-terra 500VDC/100M Ohm
Temperatura e umidità di lavoro......-10℃~+60℃, 20%~90%RH (0-45℃/100%, -10℃/80%, 60℃/60 % LOAD)
Temperatura e umidità di conservazione......-20℃~+85℃, 10%~95RH
Dimensioni complessive............199*99*50mm CASE 916A
Peso............0.6kg; 20pz/13kg/1.17CUFT
Standard di sicurezza......................Rispetto dei requisiti UL1310, TUV EN60950
Standard EMC/armonici............Incontro
EN55022 classe B/A, EN61000-3-2,3
EN61000-4-2,3,4,5,6,8,11,ENV50204
2. Selezionare la topologia di circuito principale appropriata (AC-DC).
Principi di base: livello di potenza, costo, efficienza, dimensioni
Quando la potenza è inferiore a 75 watt, in genere non ci sono restrizioni sulle armoniche in ingresso. Pertanto, viene scelto un circuito flyback con un circuito semplice e a basso costo. Il Giappone limita la potenza al di sotto dei 50W. Il requisito di illuminazione è più alto, 25W.
I requisiti generali di alimentazione per i circuiti di potenza superiore a 75 watt soddisfano la norma IEC61000-3-2 sulle armoniche. In genere è richiesta la correzione del fattore di potenza, per cui si utilizza prevalentemente una soluzione a due stadi. Boost PFC+Flyback; <100W, Boost PFC+mezzo ponte 100W< <500W
Per potenze più elevate (superiori a 500 watt), è possibile utilizzare il mezzo ponte o il ponte intero. Se i requisiti di costo sono severi, scegliete il half-bridge, mentre se la potenza è elevata, scegliete il full-bridge. I circuiti push-pull sono solitamente utilizzati in situazioni in cui la potenza è relativamente elevata e la tensione di ingresso è molto bassa.
In genere, quando la potenza è inferiore a 20 W, poiché le perdite dell'alimentatore sono costituite principalmente da componenti magnetici, interruttori e perdite di pilotaggio, la percentuale di perdite on-state è ridotta (la corrente è piccola), quindi si sceglie una soluzione con una topologia di circuito semplice. Come il DCM Flyback.
Quando la perdita dell'alimentatore è principalmente di tipo passante (alta potenza o bassa tensione e alta corrente), è necessario considerare una soluzione in grado di ridurre la perdita passante. Ad esempio: raddrizzamento sincrono, conversione multistadio, collegamento in parallelo, topologia ibrida, ecc.
3. Progettazione dei componenti
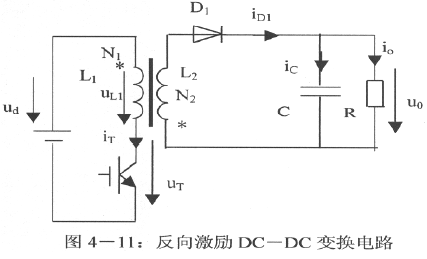
Esempio: Quali componenti del circuito principale del Flyback devono essere progettati da noi?
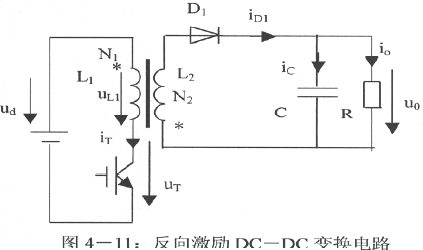
① Calcolare i parametri operativi del circuito. Tensione di ingresso e di uscita
② Parametri operativi. Frequenza di commutazione, ciclo di lavoro massimo
③ Trasformatore.
④ Tubo di commutazione - tensione, corrente
⑤ Diodo lato secondario - tensione, corrente
⑥ Condensatore di filtro in uscita
⑦ Circuito di assorbimento
fasi di progettazione
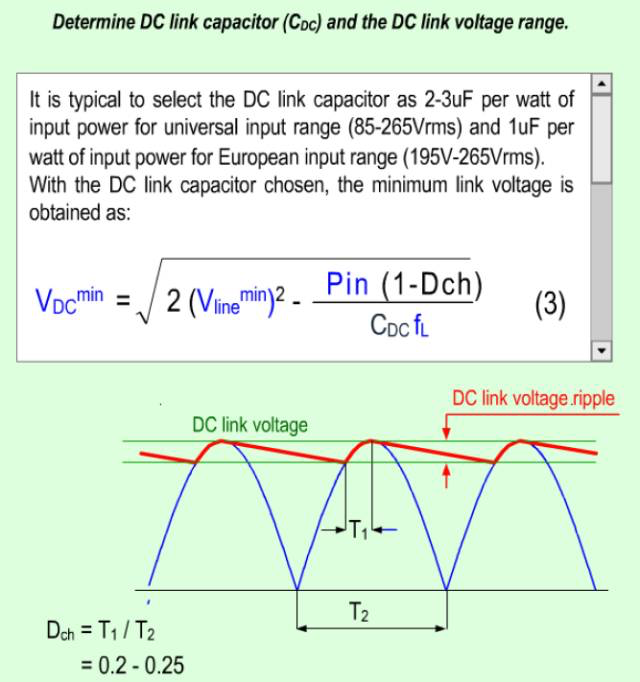
(1) Determinare il campo di variazione della tensione del bus CC di ingresso:
1) L'intervallo cambia con l'ingresso
2) Variazioni di tensione in ogni ciclo di frequenza di alimentazione
(2) Frequenza di commutazione di progetto fs, duty cycle massimo Dmax=0,45
- Impostare la frequenza di commutazione come richiesto
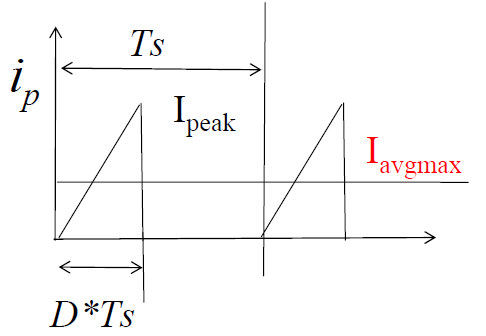
- In base alla potenza di ingresso, e assumendo la tensione più bassa e il duty cycle massimo, solo la continuità critica, determinare la corrente di picco dell'induttore
Pinmax=Pomax/efficienza
Iavgmax=Pinmax/VDCmin
Ipeak=2*Iavgmax/D
(3) Progettazione del trasformatore flyback
- Determinare l'induttanza primaria in base alla corrente di picco massima.
Pinmax=0,5*Lm*Ipeak2*fs
- In base all'esperienza, selezionare la dimensione del nucleo e calcolare il numero di giri primari.
Np=(Lm*Ipeak)/(Ae*Bmax)
Ae è l'area della sezione trasversale del nucleo; Bmax è la densità di flusso magnetico massima progettata.
- Progettare il traferro in base all'induttanza e al numero di spire.
- Selezionare il rapporto di spire appropriato in base alla tensione nominale dell'interruttore primario. Per ottenere una migliore regolazione trasversale del secondario, a volte è necessario regolare il numero di spire sul lato primario del trasformatore.
Esempio: lato secondario Vo1: Vo2=5:3
I calcoli preliminari mostrano che: Ns1=3, Ns2=1,8; se Ns2 richiede 2 giri, la velocità di regolazione potrebbe essere scarsa. Pertanto, modificare il numero di giri secondari, Ns1=5, Ns2=3.
(4) Selezione del tubo di commutazione: MOSFET di potenza
Sollecitazione della tensione di commutazione:
Ad esempio: Se si sceglie un MOSFET da 650 V sul lato primario, la sollecitazione di tensione del tubo di commutazione sul lato primario non deve superare i 600 V.
Calcolare quindi la sollecitazione massima: Vpmax=VDCmax+(Vo+Vdrop)*Np/Ns+60V
Sollecitazione della corrente del tubo di commutazione:
Calcolo della corrente massima sul lato primario del trasformatore
Normalmente: Vo*Np/Ns<140V;
Considerare un compromesso tra la sollecitazione del tubo di commutazione primario, la sollecitazione di tensione del diodo secondario e il ciclo di funzionamento massimo.
(5) Selezione del diodo secondario:
- Diodo a recupero rapido
- Calcolare la tensione di tenuta del diodo
VD=(Vdcmax*Ns/Np+Vo)*1,3
(6) Selezione del condensatore di filtro di uscita:
Selezionare i condensatori elettrolitici in base alle sollecitazioni di corrente/tensione e ai requisiti di ripple.
(7) Circuito di assorbimento RCD
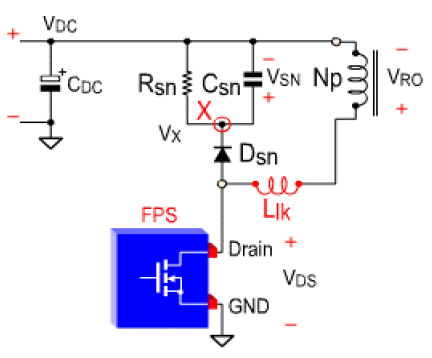
Considerate i punti problematici:
1) Effetto di assorbimento
2) La perdita è probabilmente modesta
Compromesso tra effetto di assorbimento e perdita!
Lo stesso principio di progettazione si applica non solo al FLYback, ma anche a tutti i circuiti di assorbimento con R.
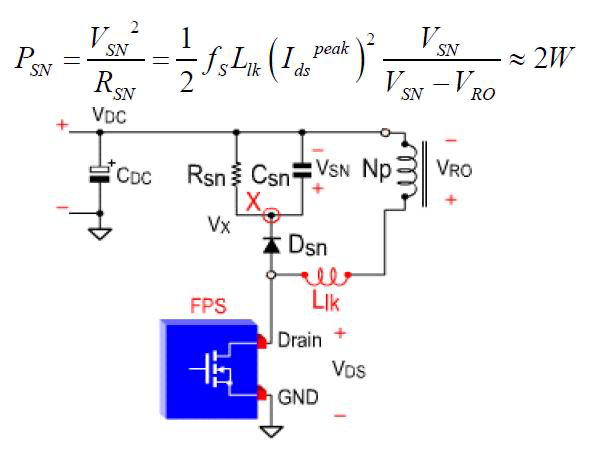
Metodo di stima delle perdite:
1) Psnuber=Vc2/R
Quando il MOSFET è spento, quando Vds supera la tensione VSN attraverso il condensatore nel circuito di snubber RCD, il diodo di snubber viene attivato. La corrente di picco viene assorbita dal circuito RCD, riducendo così la corrente di picco. Il condensatore di snubber deve essere sufficientemente grande da garantire che un interruttore La tensione attraverso il condensatore non cambi in modo significativo durante il ciclo. Tuttavia, se la capacità di assorbimento è troppo grande, aumenterà anche la perdita del circuito tampone. È necessario trovare un compromesso.
La potenza consumata dal circuito di assorbimento può essere calcolata con la seguente formula. Prendendo un resistore di potenza con una resistenza di 3W, i valori di resistenza e capacità possono essere calcolati dal software, come mostrato di seguito.
4. Altre modalità di progettazione flyback
Progettazione flyback CCM/DCM
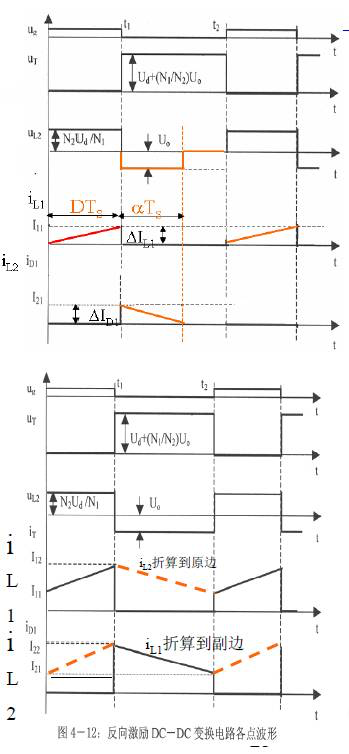
Quando la potenza è maggiore, ad esempio 65W. Per ridurre la bassa pressione
La perdita di conduzione all'ingresso fa sì che il dispositivo entri in modalità CCM a bassa tensione in ingresso. In caso di ingresso ad alta tensione, il dispositivo entra in modalità DCM.
Le fasi di progettazione sono le stesse del modello DCM, ma la formula di progettazione è diversa.
- La formula per calcolare il valore dell'induttanza primaria è differente
- La formula per il calcolo del rapporto di rotazione è diversa
- Calcolare le diverse sollecitazioni di tensione e corrente dei tubi di commutazione.
- Calcolo delle differenze di tensione e corrente del diodo
- L'ondulazione di uscita calcolata è diversa Boundary CM Flyback
Nell'intervallo variabile di tensione del bus, la modalità è fondamentale. (Conversione di frequenza) Le stesse fasi e gli stessi schemi di metodo della progettazione DCM.
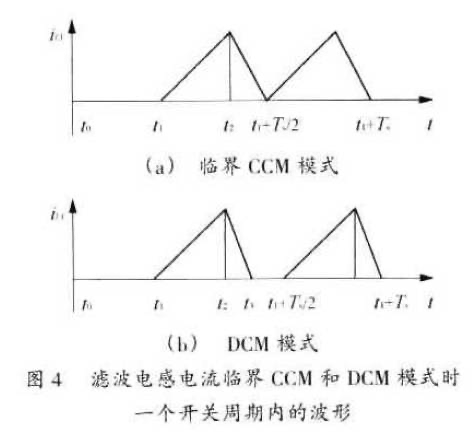
Vantaggi del BCM/DCM:
1) La perdita all'accensione del tubo primario di commutazione è piccola.
2) La corrente di recupero inversa del diodo secondario è piccola.
3) Il rumore di modo comune causato dal recupero inverso è ridotto.
4) La sollecitazione di tensione del diodo è piccola, quindi è necessario scegliere dispositivi a bassa tensione.
Svantaggi del modello BCM:
1) La perdita di conduzione del tubo di commutazione primario è elevata.
2) La frequenza cambia, il filtro di modo differenziale deve essere progettato in base alla frequenza più bassa. I filtri di modo comune devono essere progettati per le frequenze più alte.
Due condizioni fanno sì che le carenze di cui sopra non siano più importanti:
1) Con il miglioramento dei dispositivi MOSFET, Rdson diventa sempre più piccolo. Ridurre la proporzione della perdita di conduzione primaria rispetto alla perdita totale.
2) Il BCM riduce il modo comune causato dal recupero inverso del diodo sul lato secondario.
5. Progettazione termica
Il tubo dell'interruttore ha generalmente bisogno di un radiatore e tra il radiatore e il tubo dell'interruttore deve essere applicata una guarnizione isolante e un silicone per la dissipazione del calore.
Nella progettazione di alimentatori switching ad alta potenza, le ventole sono generalmente installate per utilizzare il raffreddamento ad aria forzata.
6. Progettazione del cablaggio e EMI
I pin di ciascun componente, in particolare del condensatore, devono essere il più corti possibile, altrimenti il condensatore avrà uno scarso effetto di assorbimento delle alte frequenze;
I fili di interconnessione che attraversano grandi correnti devono essere spessi o corti;
Cercate di non formare un ciclo di grandi dimensioni, altrimenti l'interferenza sarà eccessiva e comprometterà il debug.
Il cablaggio del circuito di controllo deve essere separato da quello del circuito di alimentazione.
Il chip di controllo e il trasformatore devono essere installati con le sedi per facilitare lo smontaggio. Durante il cablaggio, tenere in considerazione la dissipazione del calore e la praticità dei test. Il cablaggio è pulito e ordinato e ogni modulo funzionale è chiaro.